 مترجم: علي طالبي
مترجم: علي طالبي گاهي وقتها تنها كاري كه براي دريافت كمك از سوي كسي بايد انجام داد، اشاره كردن به اوست. اكنون، اين موضوع براي روبات نيز صادق است. محققان در سوئد يك پروژه را با هدف ايجاد قابليت همكاري در روباتها در كارهاي پيچيده و با استفاده از زبان بدن انجام دادهاند كه دريافتند روباتها هم ميتوانند با دريافت سيگنال به كمك هم بشتابند.
ديموس ديماروگوناس استاديار مؤسسه KTH و هماهنگكننده اين پروژه ميگويد پروتكلهايي را ساختهاند كه روباتها را قادر ميسازند تا از يكديگر كمك بگيرند و زماني را كه ساير روباتها به كمك نياز دارند، تشخيص دهند و برنامههاي خود را بر اساس آن تغيير دهند.
ديماروگوناس در ادامه ميگويد: «روباتها ميتوانند كاري را كه در حال انجام آن هستند، متوقف كنند و به روبات ديگري كه كمك خواسته است، كمك كنند. اين به معني وجود روباتهاي انعطافپذير و ديناميك خواهد بود كه بسيار بيشتر شبيه انسان عمل ميكنند. روباتها قادر به مواجهه مستمر با گزينههاي جديد هستند و اينكه آنها از صلاحيت كافي براي تصميمگيري برخوردارند.»
از آنجايي كه ماشينهاي مستقل مسئوليتهاي بيشتري را ميپذيرند، آنها مجبورند كارهايي را انجام دهند كه يك روبات به تنهايي نميتواند از پس انجام آنها برآيد. كار مشترك ميتواند به معني كمك كردن براي بلند كردن يا انجام دادن يك كار باشد يا ميتواند به معني نگه داشتن يك شيء در محل باشد. اما ديماروگوناس ميگويد كه اين ايده ميتوان را بسط داد تا كليه كارهاي خانه، كارخانه يا كارگاههاي ديگر را دربربگيرد.
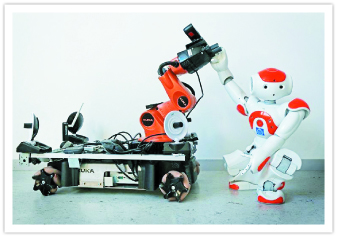
چند تن از محققان با نمايش فيلم قابليتهاي تازه كشف شده دستگاههاي مستقل و موجود از جمله روباتهاي NAO را نشان ميدهند. يكي از اين فيلمها روباتي را نشان ميدهد كه يك شيء را به روبات ديگر نشان ميدهد و با اين كار به آن روبات ميفهماند كه آن شيء را بلند كند. ديماروگوناس ميگويد كه درك مشترك روباتها كليد انجام اين كار مشترك است. وي ميگويد: «بازخورد تصويري كه روباتها دريافت ميكنند، به يك نماد براي يك شيء تبديل ميشود. روباتها با استفاده از تكنولوژي تصويري بهروز شده ميتوانند درك كنند كه يك شيء از زواياي مختلف يكسان است. اين برداشت به يك نماد كه يك لايه تا تصميمگيري است، تبديل ميشود. اين همان جسم مد نظر است كه ما بايد آن را حمل كنيم يا خير. به عبارت ديگر، آنها به يك توافق حسي ميرسند. دو روبات جسمي را با كمك هم حمل ميكنند.
يكي از روباتها پيشاپيش روبات ديگر حركت ميكند. اين روبات آنچه را كه روبات پيشرو ميخواهد، با اعمال نيرو بر جسم حس ميكند. اين حالت درست مانند زماني است كه من و تو ميزي را حمل ميكرديم و ميدانستيم كه آن ميز را كجا بايد ببريم. تو مسيري را كه من ميخواستم بروم، با چرخيدن، فشار دادن يا كشيدن من حس ميكردي. نكته مهم اين است كه همه اين كارها بدون دخالت يا كمك انسان انجام ميشوند.» او در ادامه ميافزايد: «اين كار بيدرنگ و به صورت مستقل انجام ميشود. در اين پروژه همچنين از يك پروتكل ارتباطي جديد استفاده ميشود كه اين پروژه را از ساير ايدههاي روبات همكار متمايز ميسازد. ما ارتباط را به حداقل ميرسانيم. يك پروتكل ارتباطي نمادين وجود دارد اما اين پروتكل پيوسته نيست. زماني كه كمك مورد نياز است، صداي درخواست كمك پخش ميشود و يك روبات كمك دهنده پيام را به روبات ديگر منتقل ميكند. البته، اين فقط يك تلاش است.»
منبع: ساينس ديلي