 مترجم: علي طالبي
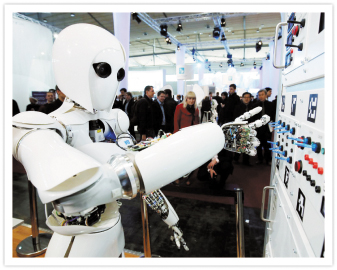
مترجم: علي طالبيبيشتر روباتهاي جديد ديگر شبيه آدمآهنيهاي فرهنگ عام نيستند و به چيزي شبيهند كه ميتوان آن را نسخههاي تك بسط يافتهاي از ما و تواناييهايمان ناميد. همانطور كه عينكها، صندليهاي چرخدار و ضربانسازهاي قلب و موارد ديگر ميتوانند به بهتر ديدن و بهتر حركت كردن مردم دنيا كمك كنند، بسياري از سيستمهاي پيشرفته روباتيك نيز چنين خواهند كرد. هدف آنها كمك به مردم است تا بهتر، قويتر و سريعتر باشند. علاوه بر اين با توجه به پيشرفتهاي اخير بسياري از اين روباتها ديگر به گراني مرد شش ميليوندلاري نخواهند بود.
كانر والش كارشناس روباتيك دانشگاه هاروارد كه در زمينه توسعه تكنولوژيهاي روباتيك نرم (شاخهاي از روباتيك با استفاده از مواد نرم و انعطافپذير چون سيليكون و پلاستيك و...) فعال است، ميگويد: «تعداد افرادي كه ناتوانيهاي جزئي دارند زياد و رو به افزايش است مثل افراد مسن يا افرادي كه دچار سكته شدهاند. به طور كلي 10 درصد از جمعيت امريكا در راه رفتن دچار مشكل هستند. وقتي به اين آمار فكر كنيد متوجه ميشويد كه با مشكل بزرگي مواجه هستيم.»
محققان ميخواهند تضمين كنند كه اين تكنولوژيها نه تنها وجود دارند، بلكه قابل اعتماد، بادوام، راحت و داراي قابليت شخصي شدن براي كاربران هستند.
پروژههاي آنان نمونههايي از سرمايهگذاري بلندمدت و گسترده فدرال در پژوهشهاي علمي و مهندسي روباتيك- محور هستند كه هدفشان بهبود رفاه و امنيت مردم در همه جا خواهد بود.
عابران نابينا
تصور كنيد ميخواهيد از خيابان شلوغ و پر سر و صدايي عبور كنيد در حالي كه قادر به ديدن نيستيد. چقدر سخت است؟ معمولاً يك انسان كامل هم در خيابانهاي شلوغ با مشكل مواجه خواهد شد چه برسد به فرد نابينا.
آرون استانفلد كارشناس روباتيك NSF در دانشگاه كارنيگي ملون عقيده دارد: «رفت و آمد ميتواند براي هركسي استرس ايجاد كند، اما براي كساني كه داراي اختلالات بينايي هستند، يكي از بزرگترين چالشها در عبور از ساختمانهاي مجتمع و ايستگاههاي ترانزيت مانند لانفانت اين است كه سرمايهگذاري كافي براي ارائه كمك انساني به افراد نيازمند در همه اوقات روز و در كل ساختمان يا فضا وجود ندارد.»
استانفلد و همكارانش در حال طراحي روباتهاي هميار يا كو- روبات هستند كه افراد ناتوان را در عبور و مسيريابي ايمن در محيطهاي ناآشنا توانمند ميكند. گروه بر تبادل اطلاعات، موضعيابي كمكي و ناوبري شهري و به خصوص بر پيدا كردن راههاي جديدي براي تعامل بين روبات و انسان متمركز شده است.
او ميگويد: «فقط تفاوت اندكي در نيازهاي ناوبري شهري بين افراد نابينا و بينا وجود دارد.» به عنوان مثال ارائه مسير به فرد نابينا و پيدا كردن مسير از روي نقشهاي كه فرد بينا در دست دارد از روش مشتركي پيروي ميكنند. در اين مورد مغايرتي كه روبات دارد، مزيت محسوب ميشود: گروه دريافته كه مردم در كار كردن با روبات به نسبت يك فرد غريبه راحتتر هستند، چون در آنها حس معذب بودن در اجتماع را ايجاد نميكند. در داستان خيابانهاي شلوغ، روباتها ميتوانند با ارائه كمكي شخصي و هوشمندانه به افراد ناتوان، كمك شاياني كنند و وظايف پيچيدهتر و مناسبتري را ارائه كنند.
منبع: ساينس ديلي