 مترجم: علي طالبي
مترجم: علي طالبيامروزه روباتها ميتوانند مأموريتهاي فضايي انجام دهند، يك مكعب روبيك را حل كنند، داروهاي بيمارستان را مرتب كنند و حتي پنكيك درست كنند. اما بيشتر روباتها نميتوانند عمل ساده گرفتن يك مداد و به اطراف چرخاندن آن براي گرفتن يك شيء صلب را مديريت كنند.
به طور آشكارا ثابت شده است كارهاي پيچيدهاي كه نياز به مهارت كار با دست (مانند غلتاندن، چرخاندن، خم كردن، حس كردن شكستگي و ديگركارهايي كه بشر بدون دردسر با دستهايش انجام ميدهد) دارند براي روباتها سخت است.
حال، يك تيم از محققان مهندسي و علوم كامپيوتر دانشگاه واشنگتن دست روباتي ساختند كه نه تنها ميتواند كارهايي با دست انجام دهد كه نياز به مهارت دارد بلكه ميتواند بدون نياز به انسان براي هدايت آن از تجارب خود ياد بگيرد.
سرپرست اين تحقيق، ويكاش كومار كه دانشجوي دكتري در علوم كامپيوتر و مهندسي است ميگويد: «كار با دست يكي از سختترين مشكلاتي است كه روباتها بايد آن را حل كنند.» امروزه تعداد زيادي از بازوهاي روباتي تواناييهاي زيادي دارند اما اين دستها (بازوهاي روباتي) به سادگي يك فنجان مكنده يا شايد يك پنجه يا گيره هستند.
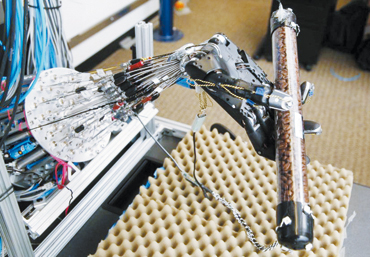
تيم تحقيقاتي كه سالها وقت را صرف ساختن دستهاي روباتي پنج انگشت در دنيا كردند شديداً در اين باره توانا هستند. آنها ابتدا يك مدل شبيهسازي دقيق را ايجاد كردند كه يك كامپيوتر را قادر به تجزيه و تحليل حركات در زمان واقعي ميكند. آنها در آخرين نمايش خود، مدل را در سختافزار و كارهاي واقعي مانند چرخاندن يك شيء بلند به كار بردند.
به لطف الگوريتمهاي يادگيري ماشين كه در مدلسازي قوانين پايهاي فيزيك و برنامههايي كه عمل كردن به آن بايد سبب دست يافتن به نتايج مطلوب شود به روبات كمك ميكنند، با هر تلاش، دست روبات به طور تصاعدي براي چرخاندن لوله ماهرتر گردد.
به گفته محققان افراد معمولاً به يك حركت نگاه كرده و سعي ميكنند تشخيص دهند دقيقاً چه اتفاقي رخ داده است (انگشت كوچك بايد به آن طرف حركت كند.)، از اينرو چند قاعده را دخيل كرده و آن را امتحان ميكنند و اگر چيزي درست كار نكرد، (مثلاً ميگويند) آه انگشت مياني زيادي حركت كرد و خودكار خم شد، بنابراين قاعده ديگري را امتحان ميكنيم. ساختن يك دست روباتي پنج انگشته ماهر، چالشهايي در طراحي و كنترل مطرح ميكند. اولين چالش شامل ساخت يك دست مكانيكي با سرعت كافي، حساسيت زياد و انعطافپذيري براي تقليد كردن رفتارهاي اساسي يك دست انسان است.
به تازگي، تيم تحقيقاتي مدل را به يك سختافزار دست با پنج انگشت منتقل كرده است كه هيچوقت ثابت نشده كه دقيقاً مانند يك سناريو شبيهسازي شده باشد. از آنجايي كه دست روباتيكي كارهاي مختلفي را انجام ميدهد، سيستم از سناريوهاي قبل و دوربينهاي ثبت حركات، جمع آوري داده كرده است و الگوريتمهاي يادگيري ماشين را براي تصحيح كردن و ايجاد مدام مدلهايي به كار برده است كه واقعگرايانهتر هستند.
اخيراً اين تيم يادگيري محلي با سيستم سختافزار را نشان دادهاند (يعني دست ميتواند به ارتقا در يك كار مجزا ادامه دهد كه شامل كاركردن با دست با همان شيء و تقريباً با همان روش است). قدمهاي بعدي شامل نشان داده يادگيري سراسري است (به اين معني كه دست ميتواند چگونگي كار با يك شيء ناآشنا يا يك سناريو جديد را كشف كند كه قبلاً با آن روبهرو نشده است).
منبع: AP