مترجم: علي طالبي
اگر يك روبات براي خنثي كردن بمب كنار جاده يا حمل ظريف تخم مرغ در زماني كه مشغول پختن املت هستيد، فرستاده شود، نيازمند قابليت حسي در زمان خارج شدن اشيا از كنترل است. با اين حال، تا امروز حس دقيق لرزش و نيروهايي برشي روي داده براي اكثر دستهاي روباتيك و مصنوعي سخت و غيرممكن است؛ براي مثال، هنگامي كه انگشت روي بخش بالايي ميز حركت ميكند يا اينكه يك شيء سقوط را آغاز ميكند.
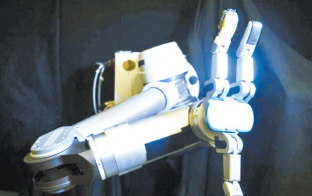
در حال حاضر، مهندسان سنسور پوستي انعطافپذيري را ساختهاند كه قابليت كش آمدن تا هر قسمت از بدن روبات يا پروتز براي ارسال اطلاعات درست در مورد لرزش و نيروهاي برشي را كه براي كنترل و گرفتن اشيا ضروري است، دارد. روبات با سنسور پوستي بيولوژيكي، جسم توصيف شده بود، روشهاي تجربه فشار و كشش انگشت دست در زمان لغزش روي سطح يا تشخيص در ميان بافتهاي متفاوت را تقليد ميكند. اين اطلاعات لمسي را با دقت و حساسيتي مشابه به پوست انسان محاسبه ميكند و توانايي روباتها در انجام ساير روندهاي مربوط به جراحي و صنعت تا تميز كردن آشپزخانه را تا حد زيادي افزايش ميدهد.
جاناتان پوسنر، نويسنده ارشد و استاد مهندسي مكانيك و شيمي در دانشگاه واشنگتن گفته است: «در حال حاضر دستهاي روباتيك و مصنوعي بر اساس نشانههاي بصري هستند؛ به عنوان مثال، آيا ميتوانم دستم را كه دور اين شيء پيچيده شده ببينم؟ يا آيا اين سيم را لمس كرده است؟ اما بديهي است كه اين اطلاعات ناقص هستند.» امروزه برخي از روباتها از انگشتهاي كاملاً ابزاري استفاده ميكنند، اما حس لامسه محدود به آن دستگاه است و نميتوانيد شكل و اندازه آنها را براي تطبيق با كارهاي متفاوت تغيير دهيد. روش ديگر پيچاندن عضو روبات در سنسور پوستي است، كه انعطافپذيري بهتري در طرح ايجاد ميكند. اما اين پوستها تا كنون گسترهاي كامل از اطلاعات لمسي را ارائه نكردهاند. پوست كششي الكترونيكي جديد، كه در بخش توليدات نانو دانشگاه واشنگتن ساخته شده بود، از لاستيك سيليكون مورد استفاده در عينك شنا ساخته شده بود. اين لاستيك با شبكههاي سرپانتين - تقريباً نصف پهناي موي انسان- احاطه شده است كه از فلز مايع رساناي الكتريكي پر شده و در هنگام كشش پوست به مانند سيمهاي سخت ترك نخورده و فرسوده نخواهند شد.
هنگامي كه انگشت خود را در سطح سر ميدهيد، يك سمت پوست زير ناخن برآمده ميشود، اين در حالي است كه سمت ديگر آن تحت فشار كشيده ميشود. اين مورد براي روبات و انگشت مصنوعي روي ميدهد، شبكه ميكرفلوئيدي در يك سمت پوست زير ناخن فشرده ميشود در حالي كه سمت ديگر پوست كشيده ميشود.
هنگامي كه هندسه شبكه دستخوش تغيير ميشود، ميزان الكتريسيته قابل جريان در آنها نيز تغيير ميكند. گروه پژوهشي قادر به محاسبه اين تفاوتها بر حسب مقاومت الكتريكي و همبسته كردن آنها با نيروهاي برشي و لرزشهايي تجربهشده در انگشت روبات است. جيانزو يين نويسنده ارشد كه به تازگي موفق به اخذ مدرك دكتري از دانشگاه واشنگتن در رشته مهندسي مكانيك شده، گفته است: «واقعاً از نشانههاي بيولوژي انسان پيروي ميكند»، « پوست الكترونيكي ما به مانند انگشت انسان از يك سمت برآمده ميشود و سنسورهايي كه نيروهاي برشي را اندازهگيري ميكند در محل پوست زير ناخن قرار خواهند داشت، كه نتيجه آن سنسوري با عملكردي مشابه با انگشت انسان است.»
گروه پژوهشي از دانشكده مكانيك دانشگاه واشنگتن و هنري ساموئلي از دانشكده مهندسي و علوم كاربردي دانشگاه لس آنجلس- كاليفرنيا ثابت كردند كه سنسوري كه فيزيكي سخت و مقاومت شيميايي داشته باشد دقت و حساسيتي بالا براي كاربردهاي لمس سطحي، باز كردن در، تماس تلفني، دست دادن، بلند كردن بستهها، كنترل اشيا، در ميان سنسورهاي ديگر دارد. آزمايشهاي جديد نشاندهنده توانايي بهتر پوست از انگشت انسان در تشخيص لرزشهاي كوچك در مقياس 800 بار در ثانيه است.
پوسنر گفت: «با تقليد از فيزيولوژي انسان در پوست انعطافپذير الكترونيكي، به سطحي از دقت و حساسيت رسيدهايم كه با دستهاي انسان مطابقت دارد، كه پيشرفتي مهم و غيرمنتظره است»، «حس لامسه براي كاربردهاي پروتز و روباتيك ضروري است و اين چيزي است كه در نهايت خلق ميكنيم.»
منبع: ساينس ديلي