مترجم: علي طالبي
هنر سنتي ژاپني اوريگامي از طريق يك الگوي بسيار خاص از چين دادن و تا كردنها، يك ورق كاغذ ساده را به شكلي پيچيده و سه بعدي تبديل ميكند. روباتهايي مبتني بر چنين ايدهاي هماكنون به طرحي جالب توجه براي طراحي روباتها تبديل شده است. البته بايد به اين روباتها باتري يا توسط اتصالات سيمي به يك منبع انرژي متصل كرد تا بزرگتر و سنگينتر شوند و نسبت به اقوام كاغذيشان، محدوديتهاي فعاليتشان از بين برود.
تيمي از محققان با الهامزيستي روباتهايي بدون نياز به باتري توليد كردهاند كه در يك ميدان مغناطيسي قادر به انجام فعاليتهاي پيچيده و تكراري است. دكتر جي سونگ كو ميگويد: «همانند اوريگامي، نكته مهم در طراحي ما ساده بودن آن است. اين سيستم فقط نيازمند اجزاي الكترونيك غيرفعال روي روبات است تا يك جريان الكتريكي برقرار كند، ساختار خود روبات بقيه كار را انجام ميدهد. نيروي تأمين شده توسط انتقال قدرت الكترومگنتيك به صورت وايرلس، جريان الكتريكي لازم را براي حركات روبات فراهم ميكند. همان تكنولوژي داخل پدهاي بيسيم كه باتريهاي تلفنهاي همراه و ساير دستگاههاي الكترونيك كوچك را شارژ ميكند، يك حلقه خارجي به واسطه منبع قدرت خودش ميداني مغناطيسي توليد ميكند كه باعث القاي جريان در مدارهاي داخل روبات ميشود كه در نتيجه آن حلقههاي SMA گرم شده و پيچ ميخورد. به جهت كنترل انقباضهاي اين حلقهها، اعضاي تيم در هر واحد حلقهها يك نوسانرسان الكترونيكي تعبيه كردند تا فقط به فركانسهاي الكترومگنتيك خاصي پاسخ بدهد. آنها توانستند با تغيير فركانس ميدان مغناطيسي خارجي، كاري كنند تا هر حلقه SMA به طور مستقل از بقيه جمع شود.
همانند ماهيچههاي بدن انسان، حلقههاي SMA نيز فقط ميتوانند منقبض و منبسط بشوند، اين ساختار بدن روبات است- مفاصل اوريگامي- كه آن انقباضات را به حركات خاصي تبديل ميكند. براي رسيدن به چنين قابليتي، تيم يك بازوي روباتيك كوچك ساخت كه قابليت خم شدن به چپ و راست را داشت و همينطور ميتوانست يك گيره را دور يک شيء ببندد و باز كند. اين دست با الگويي اوريگامي شكل ساخته شده تا بدين وسيله بتواند در پاسخ به نيروي وارده خم بشود، دو حلقه SMA اين نيرو را دريافت كرده و حلقه سوم گيره را باز ميكند. با تغيير فركانس ميدان مغناطيسي توليدي توسط حلقه خارجي، تيم توانست كنترل حركات دستي و نيز حركات خم شدن را مستقلانه به دست بگيرد.
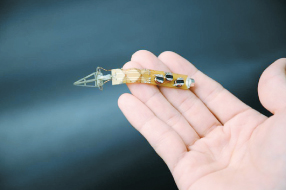
تقاضاي زيادي براي اين سبك تكنولوژي روبات مينيماليستي وجود دارد، براي مثال به جاي فرو كردن يك آندوسكوپ درون حلق يك نفر جهت كمك به پزشك جراح، ميتوان از يك ميكرو روباتي استفاده كرد كه توسط حلقهاي در خارج بدن تأمين انرژي شده و ميتواند به دور و بر حركت كرده و وظايف كوچك را نظير نگه داشتن بافت يا فيلم گرفتن انجام دهد. به كمك حلقه منبع بزرگتر، مثلاً حلقهاي با قطر چند ياردي، ميتوان ارتباطي وايرلس و بدون نياز به باتري در بين وسايل هوشمند در يك خانه برقرار كرد. اين تيم تنوعي از اين روباتها را ساخته است؛ از يك روبات چهار بعدي كوچك به اندازه يك سكه گرفته تا يك روبات كشتيمانند به اندازه دست كه از كاغذ توليد شده است. آنها اين كار را كردند تا نشان بدهند تكنولوژي آنها براي طراحيهاي مداري متنوع پاسخگو ميباشد و با موفقيت ميتواند در ابعاد مختلف توليد شود.
منبع:ساينس ديلي