مترجم: رضا محمدي
توانايي قدم زدن و پرواز كردن در طبيعت امري عادي است. بسياري از پرندگان و حيوانات ديگر ميتوانند اين دوكار را با هم انجام دهند. اگر بتوانيم روباتها را با مهارت مشابهي برنامهريزي كنيم امكانات بسياري به روي ما گشوده خواهد شد. ماشيني را تصور كنيد كه بتواند در ساختمان يا نواحي سانحه ديده دور از جادهها پرواز كند و براي انتقال اشيا يا افراد نجاتيافته با فشرده شدن از طريق فضاهاي تنگ زمين عبور نمايد. مسئله اين است روباتهايي كه در يك حالت از حمل و نقل عملكرد خوبي دارند در حالت ديگر به خوبي عمل نميكنند.
هواپيماهاي بدون سرنشين سريع و چابك هستند ولي در مجموع عمر باتري آنها براي طي كردن مسافتهاي طولاني بسيار محدود است. از طرف ديگر وسايل حمل و نقل زميني از نظر انرژي كارآمد هستند ولي حركت كندتري دارند و قابليت تحرك و تغييرپذيري كمتري دارند. محققان درصدد توسعه روباتهايي هستند كه هم بتوانند روي زمين و در پيرامون حركت كنند و هم در آسمان به پرواز درآيند.
در يك مقاله جديد تيم تحقيق سيستمي متشكل از هشت كوادكوپتر بدون سرنشين معرفي كرد كه ميتوانند پرواز كنند و از طريق يك صحنه پردازي مشابه شهر با نقاط پاركينگ و محدودههاي فاقد پرواز و جاده فرود به حركت درآيند. بنابر گفته براندون آراكي دانشجوي دكتري و سرپرست نويسندگان مقاله توانايي پرواز و نيز رانندگي در محيطهايي با موانع زياد سودمند است، زيرا ميتوانيد برفراز موانع زميني پرواز و روي زمين و پايين موانع هوايي رانندگي كنيد. هواپيماهاي بدون سرنشين معمولي اصلاً نميتوانند روي زمين حركت كنند. يك هواپيماي بدون سرنشين چرخدار با داشتن كاهش جزئي در زمان پرواز تحرك بيشتري دارد.
چگونگي عملكرد دستگاه
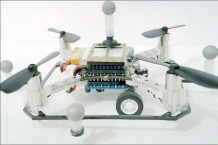
پروژهاي كه بر اساس تحقيق قبلي آراكي بناشده است در حال توسعه يك روبات ميمون پرنده است كه ميتواند بخزد، چنگ بزند و پرواز كند. در حاليكه روبات ميمون ميتواند بر فراز موانع بپرد و به اطراف بخزد ولي هنوز راهي براي مسافرت كردن خودگردان و مستقل آن وجود ندارد. براي اينكار تيم تحقيق با هدف اطمينان از اينكه هواپيماي بدون سرنشين نميتواند تصادف كند الگوريتمهاي متعددي از برنامهريزي مسير را توسعه داد. تيم تحقيق براي توانا ساختن اين هواپيماها براي رانندگي دو موتور كوچك به همراه چرخهايي در كف هواپيما قرار داد. در شبيهسازيها روباتها ميتوانستند قبل از تمام شدن باتريهايشان 90 متر پرواز يا يك مسير 253 متري را رانندگي كنند.
با اضافه كردن مؤلفه پيشبرنده به هواپيماي بدون سرنشين عمر باتري آن كمي كاهش يافت به اين معنا كه حداكثر مسافتي كه ميتوانستند پرواز كنند به ازاي حدود 300 فوت 14 درصد كاهش يافت. به دليل وزن اضافي، كارآمدي رانندگي نسبت به كارآمدي و انحرافات پرواز بيشتر است.
جينگ جين يو، استاد كامپيوتر دانشگاه راتجرز كه در اين تحقيق شركت داشته است ميگويد:«اين كار يك راهحل الگوريتمي براي حمل و نقل در مقياس وسيع و سبك مختلط فراهم ميكند و كاربردي بودن آن براي مشكلات زندگي واقعي را نشان ميدهد. اعضاي تيم تحقيق با هدايت هشت روبات روي يك مسير بدون مانع از يك نقطه شروع بهطرف نقطه پايان آنها را مورد آزمايش قرار دادند و تمام هشت روبات در اين آزمايش موفق بودند. سيستمهاي شبيه اين سيستم رويكرد ديگري براي خلق ماشينهاي پرنده ايمن و كارآمد پيشنهاد ميكنند. رويكردي كه تنها قراردادن بال روي ماشينها نيست بلكه بر مبناي افزودن تواناييهاي رانندگي به هواپيماي بدون سرنشين است. زمانيكه شروع به توسعه برنامهريزي و كنترل الگوريتمهايي براي ماشينهاي پرنده كرديم با امكان ايجاد روباتهايي با اين تواناييها در مقياس كوچك مورد تشويق قرار گرفتيم. با وجود اينكه هنوز چالشهاي بزرگي در راه ارتقاي ماشينهايي كه عملاً بتوانند انسانها را جابهجا كنند وجود دارد ولي الهامبخش ما پتانسيل آينده است كه ماشينهاي پرنده ميتوانند حمل و نقلي سريع و بدون ترافيك را به ما عرضه كنند.»
منبع: ساينس ديلي










